03 Stable Wheel#
Aim#
To show how a rolling bicycle wheel “organizes” its stability.
Subjects#
1Q60 (Rotational Stability)
Diagram#
Fig. 262 .#
Equipment#
Small bicycle wheel; \(\varnothing=40 \mathrm{~cm}\) (or any other wheel or disc).
Presentation#
Place the wheel upright on the floor. On release it falls down immediately.
Then the wheel is released while turning. It rolls over the floor and remains upright for a much longer time.
The second observation made is that it will follow a curve when it starts falling down. Also notice that the curve it makes, is into the direction of the “falling down” (see Figure 263).
Fig. 263 .#
Explanation#
Figure 264A shows the wheel turning. The rotation is indicated by means of the vector \(\underline{\omega}\). Due to some disturbance, the wheel inclines due to gravity: a torque ( \(\tau\) ) is acting on the wheel (see Figure 264).
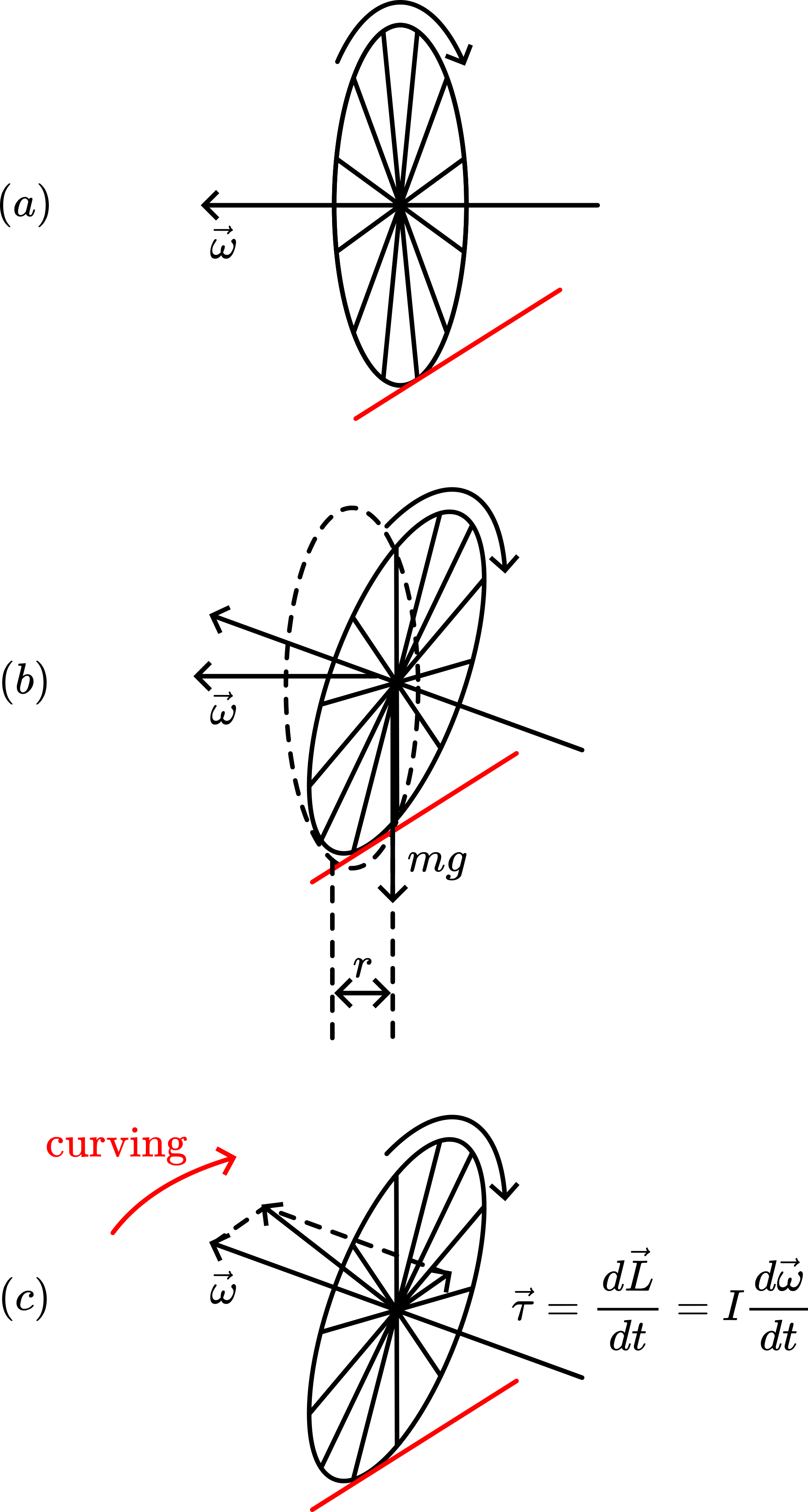
Fig. 264 .#
Due to this torque the direction of the vector \(\underline{\omega}\) is changed: \(\underline{\omega}\) is changed into the direction of \(\tau\) (see Figure 264C), so the wheel will make a curve while rolling. This continues because the vectors \(\underline{\omega}\) and \(\tau\) remain perpendicular to each other.
Also can be seen now that the larger the inclination, the sharper the curve it will make since vector \(\vec{r}\) increases, making \(\vec{tau}\) larger.