01 Electric Motor (Synchronous Motor)#
Aim#
To show the basic principle of an electric motor
Subjects#
5K40 (Motors and Generators)
Diagram#
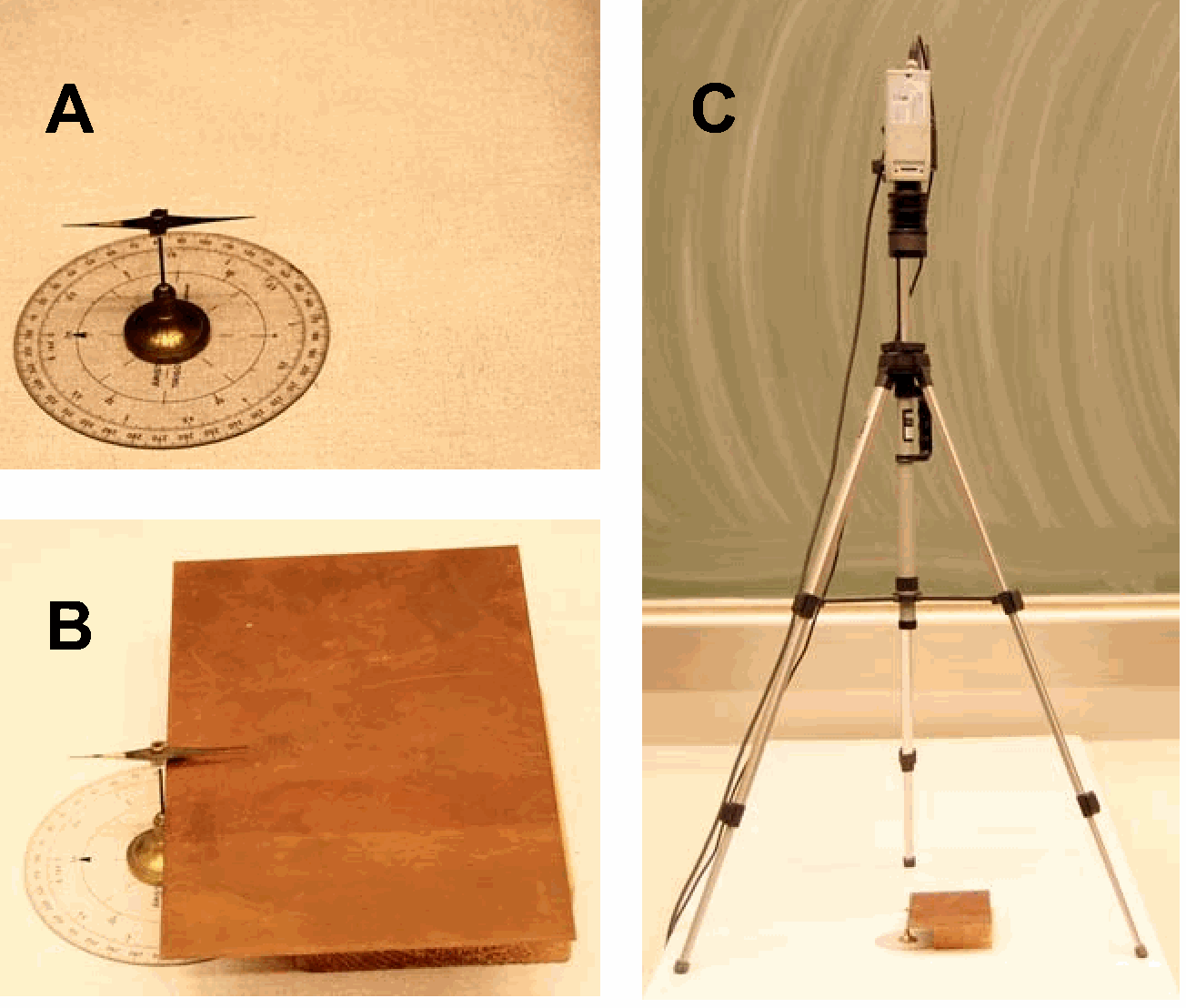
Fig. 544 .#
Equipment#
Bicycle with \(6\mathrm{~V}\) ac dynamo.
Transformer, \(6\mathrm{~V}\) ac output.
Disassembled dynamo.
Presentation#
The bicycle has his front wheel lifted from the ground (see Diagram). The dynamo is pressed against the rim of the front wheel-tire. The \(6 \mathrm{~V}\) ac output of the transformer is connected to the dynamo and switched on. Now the dynamo is shaking and makes a humming sound.
When the front wheel is given a turn by hand, the wheel will continue turning, driven by the dynamo. The dynamo is working as an electric motor now. When the wheel is loaded (braking it lightly by means of your hand on the tire) then the wheel stops abruptly and the dynamo shakes and hums again.
When you give the wheel a push into the other direction the dynamo will also drive the wheel into that direction.
Explanation#
Inside the dynamo we find a static coil and a rotating permanent ceramic magnet. The ceramic magnet has 8 poles and turns inside the coil (see Figure 545 and a disassembled dynamo).
Fig. 545 .#
By means of two claw rings, whose claws fit in the inside of the coil, the magnetic North- and South pole “appear” perpendicular to the coil. Turning the magnet makes the North- and South pole switch their position. And turning the magnet will induce an emf in the coil.
When a power supply makes an ac current flow through the coil, the claws change their North-South polarity continuously, attracting and repelling the poles of the ceramic magnet. When the magnet has the right speed, movement into one direction will continue (see Figure 546a).
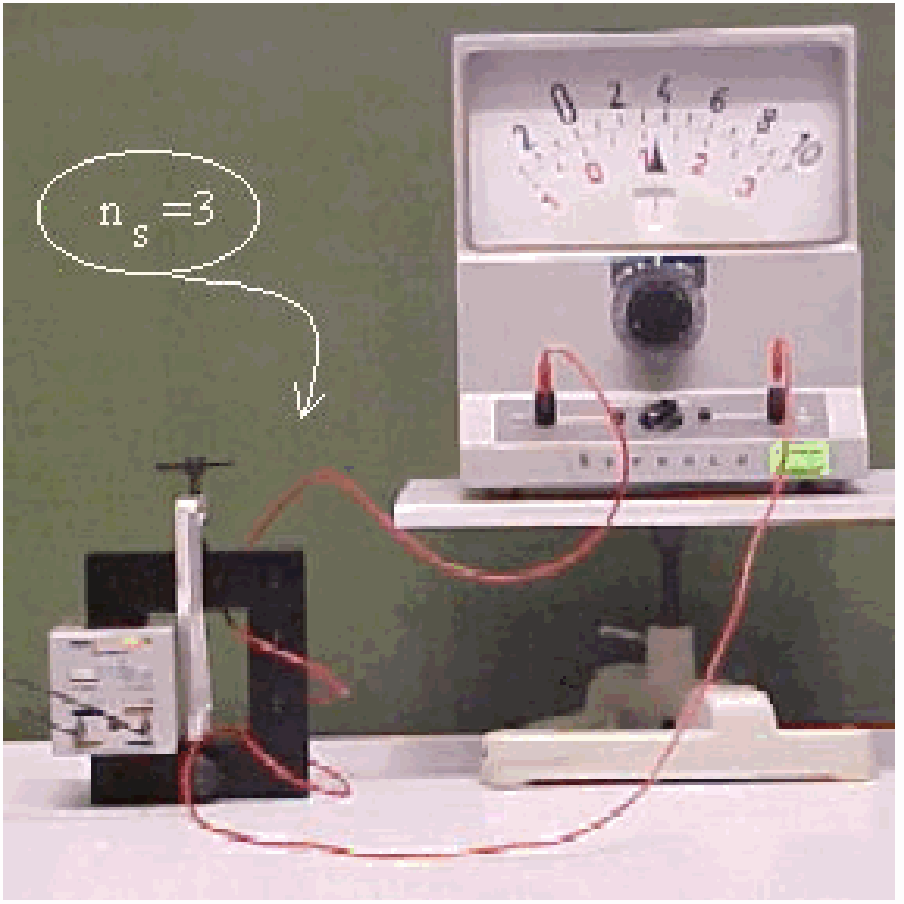
Fig. 546 .#
When the magnet is too slow just a little bit the driving momentum, \(F \Delta \Delta\) on the magnet becomes smaller and smaller, because \(\Delta t\) becomes smaller and smaller and the magnet will stop (see Figure 546b).
The magnet cannot start turning by itself because its rotational inertia is too high to pick up the right speed within \(0.01 \mathrm{sec}\). When standing still the magnet is repelled and then attracted and so on, so it will make a vibrating movement.
The rotational speed of the magnet is directly related to the ac frequency of the power supply. (This is why this type of motor is called a synchronous motor.) We have \(f=50 \mathrm{~Hz}\), so every \(0.01 \mathrm{sec}\). the claws switch polarity. With 8 poles in the magnet, the magnet will make a full turn in \(0.08 \mathrm{sec}\). This is in 4 cycles of the ac-current. So the magnet will turn round with a frequency of \(50 / 4=12.5 \mathrm{~Hz}\). The diameter of the dynamo’s wheel will determine how fast the frontwheel of the bicycle will go round.
Video Rhett Allain#
See 9:59 minutes
Sources#
Mansfield, M and O’Sullivan, C., Understanding physics, pag. 495-496
Sutton, Richard Manliffe, Demonstration experiments in Physics, pag. 348